Norman Wildberger is the creator of rational trigonometry, an alternative to classical trigonometry. After using this beautiful theory for about 10 years, I think the main advantages for me have been the ease of derivation of algebraic expressions and the ease of interpretation of those formulas. I find it easier and easier to derive novel formulas by using the laws that I will discuss below. But even more important to me is that I find it easier to interpret the formulas in comparison with their classic counterparts. Let me explain.
I am a scientist, so the formulas need to tell me something about the actual physical situation that they are designed to represent. In my case they express relations between observable variables (measurements with one or more cameras) and not directly observable variables (3D properties of objects and their configurations). The formulas help me to really understand those relations, since they are algebraic expressions using only addition, subtraction, multiplication, division, and an occasional square root.
Main laws
The crucial starting point is that Wildberger uses quadrances and spreads instead of distances and angles. The translation between the old and the new entities is as follows. A quadrance 



A spread 


So, a generic triangle has three quadrances and three spreads. Note that the line segment with quadrance 


Quadrances are graphically denoted with a rectangular box in the middle of the line segment. Spreads are graphically denoted with a straight line in the corner between the two line segments.
In my experience it takes some getting used to this approach, but I promise that rational trigonometry will pay off in a big way later.
Spread law
This is quite familiar to those who remember the sine law

Cross law
This is the actual work horse. I use it almost every week.

Triple spread formula
This is the one that you have to get used to the most.

Special cases
The other two laws are for special triangles.
Pythagorean theorem
If spread 


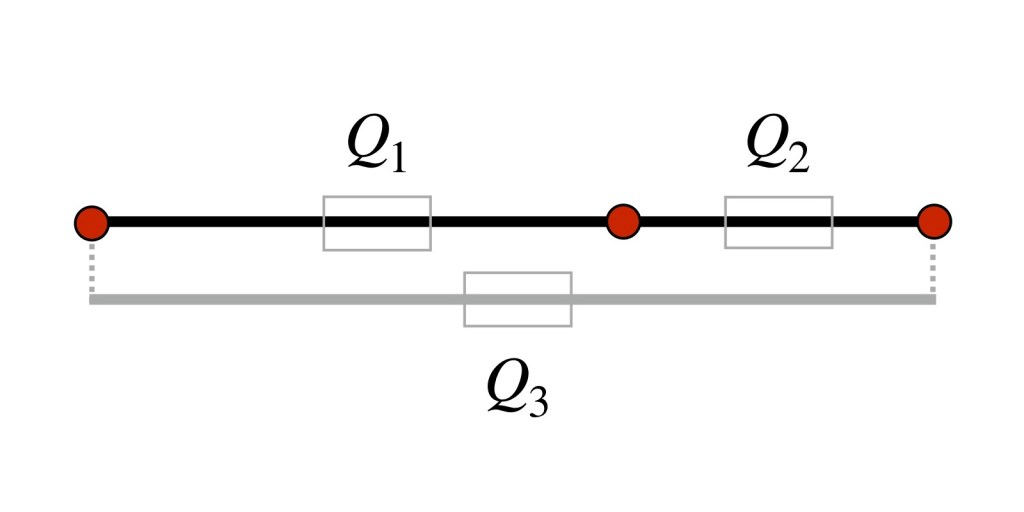
Triple quad formula
If all spreads are equal to 0. Or in other words, three points are on a line then the three quadrances are related as:

Note that all quadrances have equal status. You can view it as a triangle with an area equal to 0.
There is also a non-symmetrical version of this formula that can easily be derived from the cross law.

In general, this is one the hardest formulas to wrap your mind around. Since we are so used to lengths being additive, this may be confusing at first.
Applying these laws in real life
I want to remind you here that I am not a mathematician. My goal is to derive formulas that are useful in the domain that is the core theme if this website: 3D computer vision.
It may occasionally become clear that I am a scientist (trained as a physicist). So, I will regularly check the dimensions of my formulas. And I will interpret the formulas in terms of entities that I can measure with rulers and protractors.
You can subscribe to my newsletter here. If you have any questions, contact me here.
